Reynolds Flocking Simulation with Evolution
Before I get into the details of the project, please look at this brief overview of Genetic Algorithm
Having experimented with genetic algorithms, I wanted to apply them to the Reynold's flocking simulation. The simulation is a simple one, where a group of boids (birds) are trying to reach a target. The boids have a few simple rules that they follow:
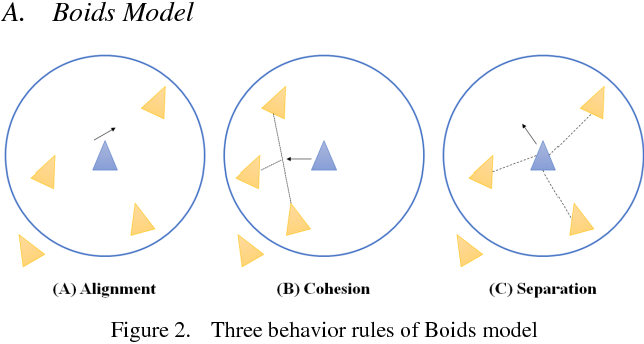
Each of these rules has a weight associated with it and are applied using 3D vectors. These weights will act as the DNA of the boids. The weights will be randomly generated and then the boids will be tested. The test score will be finalized by a fitness function. The boids with the best fitness will be selected to breed. The DNA (weights) of the boids will be crossed over and mutated to create the next generation of boids. This process will be repeated until the boids stop dying off due to collisions.
The crossover and mutation functions are similar to those described in the genetic algorithm project. The boids themselves have collision avoidance steering, alignment steering, cohesion steering and separation steering. The flight path of each boid adds all the steering vectors together to get a final steering vector.
The fitness score is lowered every time a boid collides with another boid and dies off. Now this should have worked perfectly but in genetic algorithms there are always nuances that are realized later in the code. In this case simply have a negative fitness for the boids will make them evolve into a group of boids that will never collide... Effectively making them NOT boids. This is because the boids will always try to avoid each other which can be done by having high separation weight. The solution to this is to have positive feedback/fitness based on the number of neighbors a boid has and extra fitness for successfully reaching the target threshold. This will make the boids evolve to a point where they will evade other boids but also stay as a group. This is the final result of the simulation.
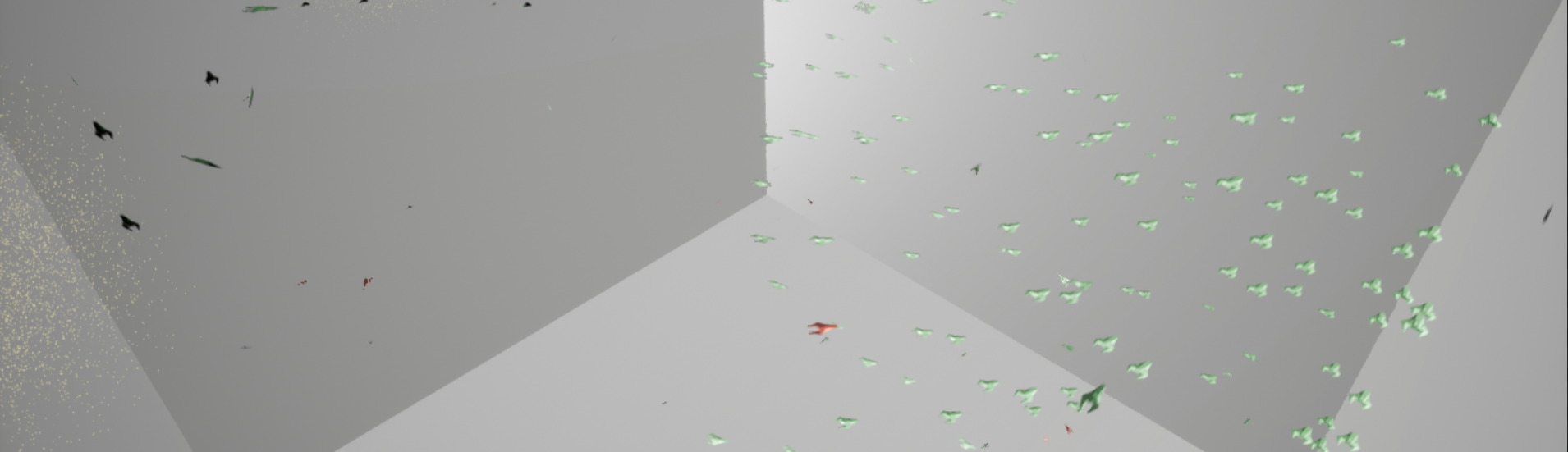
I have hard coded the strength values for all the vectors as they were after the evolution to show the final result.